
Fragst du dich, wie CAN-Bus die Kommunikation die komplexen Komponenten eines EV-Batteriesystems verbinden? Du bist hier richtig, weil ich genau erklären werde, wie dieses kritische Netzwerk funktioniert. Ich habe Jahre damit verbracht, Hochspannungsintegrationsherausforderungen zu bewältigen, und ich werde dir zeigen, warum das Meistern dieses Kommunikationsprotokolls für dein Fahrzeug unerlässlich ist.
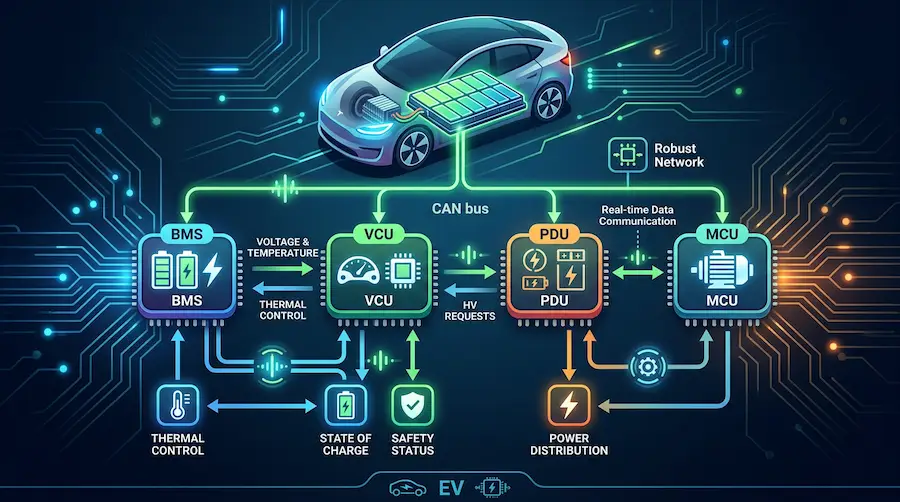
CAN (Controller Area Network)-Bus in einem EV-Batteriesystem ist ein robustes Fahrzeugnetzwerkprotokoll. Es ermöglicht Mikrocontrollern wie dem BMS, PDU und VCU, zu kommunizieren und Echtzeitdaten auszutauschen, ohne einen Host-Computer, und sorgt so für Batteriesicherheit, Thermomanagement und Hochspannungssteuerung.
Lass uns tief in die spezifischen Funktionen, Komponenten und Testmethoden von CAN-Bus-Netzwerken eintauchen. Ich werde dir genau zeigen, wie dieses kritische System moderne Elektrofahrzeuge sicher am Laufen hält und wie du häufige Integrationsfehler vermeiden kannst.
Was ist CAN-Bus in einfachen Worten?
Denk an den CAN-Bus als das zentrale Nervensystem eines Elektrofahrzeugs.
Im menschlichen Körper benötigt dein Gehirn kein separates, spezielles Nervenkabel, das an jedes einzelne Muskelfaser angeschlossen ist, um ein Signal zu senden. Stattdessen sendet es Signale über ein gemeinsames Nervensystem, und die richtigen Muskeln reagieren.
Der CAN-Bus macht genau dasselbe für ein EV-Batteriesystem.
Anstelle der Verwendung schwerer, teurer Punkt-zu-Punkt-Kupferverkabelung zwischen jedem einzelnen Sensor und Steuergerät senden alle elektronischen Steuergeräte (ECUs) ihre Nachrichten auf ein gemeinsames Zweidrahtnetzwerk.
Jedes Gerät im Netzwerk kann die Nachrichten “hören”, aber sie reagieren nur auf die Daten, die für sie relevant sind.

Zum Beispiel, wenn das Batteriemanagementsystem (BMS) feststellt, dass die Lithium-Ionen-Batterie Batteriepacks zu heiß wird, sendet es eine Nachricht auf den CAN-Bus. Das thermische Managementsystem des Fahrzeugs hört diese Nachricht und schaltet sofort die Flüssigkeitskühlpumpen ein.
Dies geschieht in Millisekunden. Es ist äußerst zuverlässig, hoch resistent gegen elektrische Störungen und reduziert grundlegend das Gewicht und die Komplexität des Verkabelungssystems des Fahrzeugs.
CAN-Bus vs Automotive Ethernet
Wenn Sie Systemarchitekt oder Elektrotechniker sind, fragen Sie sich vielleicht, ob Sie bei CAN bleiben oder auf Automotive Ethernet umsteigen sollten.
Hier ist die Wahrheit: Beide haben ihren Platz, aber sie erfüllen völlig unterschiedliche Zwecke.
Der CAN-Bus (und sein schnelleren Bruder, CAN FD) ist deterministisch. Das bedeutet, dass Nachrichten innerhalb eines hoch vorhersehbaren, strengen Zeitrahmens garantiert ankommen. Er ist für absolute Zuverlässigkeit und Fehlertoleranz in Umgebungen mit hohem Störpegel ausgelegt.
Automotive Ethernet hingegen ist für massiven Datenverkehr ausgelegt. Es kann bis zu 10 Gbps bewältigen, was es perfekt macht für fortschrittliche Fahrerassistenzsysteme (ADAS), LIDAR und hochauflösende Videoströme.
Schauen wir uns einen kurzen Vergleich an:
Geschwindigkeit: CAN erreicht maximal 1 Mbps (oder bis zu 8 Mbps bei CAN FD). Ethernet schafft problemlos 1 Gbps bis 10 Gbps.
Latenz: CAN ist hoch deterministisch mit Mikrosekunden-Latenz für kritische Sicherheitsrahmen. Ethernet erfordert komplexe, zeitkritische Netzwerkswitches (TSN), um eine ähnliche Determinismus zu erreichen.
Verdrahtung: CAN verwendet eine einfache ungeschirmte oder geschirmte verdrillte Leitung. Ethernet erfordert komplexere, spezialisierte Verkabelung, um Datenverluste zu verhindern.
Anwendung in E-Fahrzeugen: CAN ist unbestritten der König für das Batteriemanagementsystem (BMS), die Hochspannungs-Stromverteilungseinheit (PDU), und die Fahrzeugsteuerungseinheit (VCU). Ethernet übernimmt die Infotainment- und autonome Fahrsteuerung.
Für die Kernenergie- und Sicherheitssysteme Ihrer batteriebetriebenen Plattform bleibt der CAN-Bus der Goldstandard.

Was sind die Zwecke der CAN-Bus-Kommunikation in einem EV-Batteriesystem?
Der Hauptzweck der CAN-Kommunikation besteht darin, sicherzustellen, dass das Lithium-Ionen-Batteriepaket sicher und effizient arbeitet.
Batterieprojekte scheitern oft in der Integrationsphase, nicht weil Komponenten fehlen, sondern weil mechanische, thermische, elektrische und Steuerungssysteme nicht als eine koordinierte Lösung entwickelt werden. Der CAN-Bus ist der Klebstoff, der diese Koordination schafft.
Hier sind die spezifischen Zwecke, die er erfüllt:
1. Echtzeit-Batterieüberwachung
Das BMS berechnet ständig den Ladezustand (SOC) und den Gesundheitszustand (SOH) der Batterie. Es sendet diese Daten über den CAN-Bus, damit das Armaturenbrett die verbleibende Reichweite anzeigen kann und der Motorcontroller genau weiß, wie viel Leistung sicher entnommen werden kann.
2. Thermomanagement-Auslösung
Hochleistungsplattformen, wie elektrische Lastwagen und Seeschiffe, haben strenge Anforderungen an die Flüssigkeitskühlung. Wenn die Zelltemperaturen während des Schnellladens oder starker Beschleunigung steigen, sendet das BMS eine CAN-Anfrage an das Kühlsystem, um die Pumpengeschwindigkeit und Ventilpositionen anzupassen.
3. Hochspannungs-Sicherheit und Kontaktorsteuerung
Der PDU/HV-Steuerkasten ist verantwortlich für das physische Verbinden und Trennen der Hochspannungsbatterie vom Fahrzeug. Wenn das BMS einen kritischen Fehler erkennt – wie einen thermischen Durchbruch oder eine schwere Überspannung – sendet es sofort eine hochprioritäre CAN-Nachricht an die PDU, um die Hauptkontaktoren zu öffnen und die Energiezufuhr zu unterbrechen, um das Fahrzeug zu schützen.
4. Ladekoordination
Wenn Sie ein E-Fahrzeug anschließen, akzeptiert das Fahrzeug nicht einfach blind die Energie. Das BMS nutzt den CAN-Bus, um mit dem Gleichstrom-Schnellladegerät zu kommunizieren, und verhandelt in Echtzeit die genauen Spannungs- und Stromgrenzen, um Zellschäden zu vermeiden.
Wie funktioniert die CAN-Bus-Kommunikation in einem EV-Batteriesystem?
Um zu verstehen, wie es funktioniert, müssen Sie zwei Schlüsselkonzepte verstehen: differentielle Signalübertragung und Nachrichten-Arbitration.

Zuerst verwendet CAN zwei Drähte: CAN_Hoch und CAN_Tief.
Wenn ein Modul eine digitale “1” (rezessives Bit) senden möchte, liegen beide Drähte bei 2,5 Volt. Wenn es eine digitale “0” (dominantes Bit) senden möchte, springt CAN_High auf 3,5 Volt und CAN_Low fällt auf 1,5 Volt.
Da das System den Spannungsunterschied zwischen den beiden Drähten liest, ist es hochgradig immun gegen die massiven elektromagnetische Störungen (EMI), die von Hochspannungs-Elektrofahrzeug-Invertern erzeugt werden. Wenn ein elektromagnetischer Impuls das Kabel trifft, trifft er beide Drähte gleichermaßen, und der Spannungsunterschied bleibt genau gleich.
Zweitens verwendet CAN ein prioritätsbasiertes Nachrichtensystem namens Nicht-Destruktive Bitweise Arbitrage.
Jede Nachricht hat eine Kennung (ID). Je niedriger die ID-Nummer, desto höher die Priorität.
Wenn das Infotainmentsystem versucht, eine Nachricht genau im selben Millisekunden zu senden, in dem das BMS versucht, eine kritische “Über-Spannungs-Fehler”-Nachricht zu senden, schaut das System auf die IDs. Die BMS-Fehlernachricht wird eine niedrigere ID (höhere Priorität) haben. Das Infotainmentsystem stoppt sofort die Übertragung, lässt die BMS-Nachricht durch und versucht es später erneut.
Dies stellt sicher, dass intelligente Steuerungsnachrichten immer das Rennen gewinnen.
Woraus besteht die CAN-Bus-Kommunikation in einem EV-Batteriesystem?
Wenn Sie ein Fahrzeugintegrationsingenieur oder ein Einkaufsleiter sind, der Teile beschafft, müssen Sie genau wissen, welche Hardware dieses Netzwerk bildet.
Auf hoher Ebene besteht das Netzwerk aus mehreren Knoten, die mit einem zentralen Bus verbunden sind. In einem EV-Batteriesystem besteht dies aus:
1. Der Battery Management System (BMS)-Knoten
Dies ist das Gehirn der Batterie. Es umfasst einen CAN-Controller (der die Daten in Frames formatiert) und einen CAN-Transceiver (der die digitalen Frames in physikalische Spannungspulse auf den Drähten umwandelt). Wir integrieren oft intelligente BMS-Architekturen, die speziell für anspruchsvolle Umgebungen entwickelt wurden.
2. Der PDU / HV-Steuerkasten-Knoten
Der Power Distribution Unit verwendet seinen CAN-Knoten, um Befehle vom VCU oder BMS zu empfangen, um Vorlade-Schaltungen und Hauptrelais zu schließen.
3. Der Vehicle Control Unit (VCU)-Knoten
Der VCU agiert als Hauptkommandant. Er nimmt Eingaben vom Gaspedal auf und sendet CAN-Drehmomentanforderungen an den Wechselrichter, während er gleichzeitig die CAN-Daten des BMS überprüft, um sicherzustellen, dass die Batterie die Last bewältigen kann.
4. Die Physikalische Schicht
Dazu gehören abgeschirmte Twisted-Pair-Kabel, Standard-Automobilstecker (wie TE Connectivity oder Amphenol) und die kritischen 120-Ohm-Endwiderstände, die an den beiden entferntesten Enden des Busses platziert sind, um Signalreflexionen zu verhindern.

Wenn Sie Off-Highway- oder Spezialfahrzeuge bauen, ist es äußerst schwierig herauszufinden, wie all diese Knoten miteinander kommunizieren. Tier-1-Zellhersteller sind für große Standardvolumen ausgelegt und hinterlassen oft eine enorme Ingenieurkopfschmerzen, wenn es darum geht, wie ihre Rohmodule mit Ihrem Fahrzeug kommunizieren.
Hier wird ein schlüsselfertiger Integrationspartner unverzichtbar, der hilft, die Systemarchitektur zu definieren und die Kommunikation des VCU nahtlos zu integrieren.
Was sind die Vorteile der CAN-Bus-Kommunikation?
Der CAN-Bus besteht seit Jahrzehnten in der Automobilindustrie aus gutem Grund. Hier ist, warum er nach wie vor die beste Wahl für EV-Batteriesysteme ist:
Extrem Zuverlässigkeit: Die Differential-Signalübertragung, die ich zuvor erwähnt habe, macht ihn praktisch unempfindlich gegen die EMI, die von Hochvolt-Elektromotoren erzeugt wird.
Reduziertes Gewicht und Kosten: Durch die Verwendung eines einzigen verdrillten Drahtpaars für Dutzende von Geräten sparen OEMs eine enorme Menge an Kupfer. In der Herstellung von Nutzfahrzeugen bedeutet diese Gewichtsreduzierung direkt eine bessere Batteriereichweite.
Zentralisierte Diagnostik: Da jede Nachricht über denselben Bus läuft, kann ein Techniker einen OBD-II-Scanner an eine einzige Schnittstelle anschließen und gleichzeitig den Zustand des BMS, des PDU und des Kühlsystems auslesen.
Plug-and-Play-Skalierbarkeit: Müssen Sie einen zusätzlichen Datenlogger oder ein sekundäres Display hinzufügen? Sie müssen das gesamte Fahrzeug nicht neu verkabeln. Sie greifen einfach auf den bestehenden CAN-Bus zu und programmieren das neue Gerät so, dass es die richtigen IDs hört.
Was sind die Nachteile der CAN-Bus-Kommunikation?
Trotz seiner Brillanz ist CAN nicht perfekt. Wenn Sie CTO oder Forschungs- und Entwicklungsleiter sind, der Ihre nächste Plattform plant, müssen Sie sich dieser Einschränkungen bewusst sein:
Begrenzte Bandbreite: Der klassische CAN erreicht maximal 1 Mbps. Für Relaisbefehle und Temperaturmessungen ist das ausreichend, aber bei großen Datensätzen, wie Batterenzimpedanzspektroskopie-Diagrammen oder Kameraübertragungen, kommt es zu Engpässen.
Sicherheitslücken: CAN wurde für Zuverlässigkeit entwickelt, nicht für Cybersicherheit. Es verfügt über keine native Verschlüsselung. Wenn ein böswilliger Akteur Zugriff auf den Bus erhält, kann er Nachrichten leicht “spoofen” – zum Beispiel den PDU anweisen, die Hochvolt-Schütze zu öffnen, während das Fahrzeug auf der Autobahn fährt.
Netzwerklastprobleme: Wenn zu viele Geräte (Knoten) an einen einzelnen Bus angeschlossen werden, kann die Netzwerkauslastung 70% übersteigen. Wenn dies passiert, werden Nachrichten mit niedriger Priorität ständig von höher priorisierten Nachrichten blockiert, was zu Bildverlusten und Systemverzögerungen führt.
Wie testet man die CAN-Bus-Kommunikation in einem EV-Batteriesystem?
Wenn Sie ein Testingenieur oder Programmmanager sind, der die endgültige Inbetriebnahme überwacht, können Sie nicht einfach die Finger kreuzen und hoffen, dass die Kommunikation funktioniert.
Gründliche Tests sind ein obligatorischer Schritt, insbesondere für Anwendungen wie elektrische Bergbaufahrzeuge oder Marinefahrzeuge, die hochzuverlässige, explosionsgeschützte Systeme erfordern. .
So testen Fachleute das CAN-Netzwerk:

1. Physikalische Schichtprüfung
Bevor ich mir die Software anschaue, nehme ich immer ein Oszilloskop zur Hand. Ich prüfe die CAN_High- und CAN_Low-Leitungen, um sicherzustellen, dass die Leerlaufspannung genau bei 2,5 V liegt. Ich suche nach sauberen, quadratischen Spannungspulsen ohne abgerundete Kanten oder elektrische Rauschspitzen. Ich verwende auch ein Multimeter mit ausgeschaltetem Strom, um sicherzustellen, dass der Buswiderstand genau 60 Ohm beträgt (zwei 120-Ohm-Widerstände parallel).
2. Protokollschichtprüfung
Als Nächstes schließe ich ein CAN-Sniffer-Tool an, wie einen Vector CANalyzer oder eine PCAN-USB-Schnittstelle. Damit kann ich den rohen hexadezimalen Datenverkehr auf einem Laptop auslesen. Ich überprüfe, ob das BMS seine 11-Bit- oder 29-Bit-CAN-IDs korrekt im richtigen Zyklus (z. B. alle 10 oder 100 Millisekunden) überträgt.
3. Fehlerinjektionstest
Sie müssen wissen, wie das System reagiert, wenn etwas schief läuft. Ich werde absichtlich den CAN_High-Leiter auf Masse kurzschließen, um zu sehen, ob das BMS erfolgreich einen Kommunikationsverlust-Fehler protokolliert und ob das Fahrzeug in einen sicheren “Limp-Modus” wechselt.”
Die Herstellung sollte stets durch die End-of-Line (EOL)-Testprotokolle von 100% gesteuert werden, um diese Integrationsprobleme zu erkennen, bevor sie in die Praxis gelangen.
Fazit
Das Verständnis der CAN-Bus-Kommunikation ist der Schlüssel, um sichere, zuverlässige und intelligente Steuerung in jedem EV-Batteriesystem zu ermöglichen. Es überbrückt die Lücke zwischen der rohen Zellchemie und der übergeordneten Steuerstrategie Ihres maßgeschneiderten Fahrzeugs.
Die Integration eines intelligenten BMS, eines Hochspannungs-PDU, und nahtloser VCU-Kommunikation in ein vollständig zertifiziertes, plug-and-play Energie-System ist eine enorme ingenieurtechnische Herausforderung.
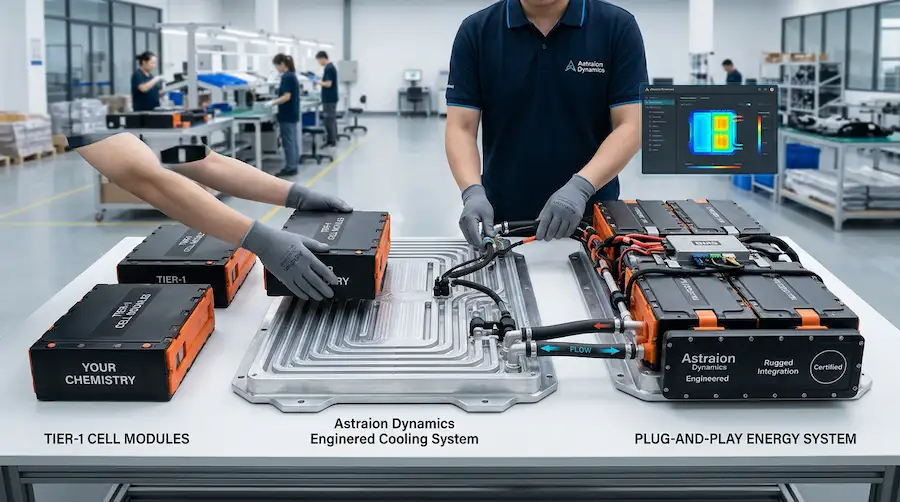
Wenn Sie ein Vehicle Integration Engineer sind, der Schwierigkeiten hat, Tier-1-Batteriemodule zuverlässig mit Ihrer Schwerlast-, Marine- oder Off-Highway-Plattform zu kommunizieren, benötigen Sie möglicherweise einen ingenieurgetriebenen Integrationspartner.
At Astraion Dynamics, unser Geschäftsmodell ist einfach: Sie kontrollieren die Chemie, wir beherrschen die Technik. Wir unterstützen Batteriesystem-Programme von der Konzeption bis zur Inbetriebnahme und stellen sicher, dass Ihre CAN-Architektur fehlerfrei und einsatzbereit ist.
Kontaktieren Sie noch heute unser Engineering-Team um Ihre Plattformbeschränkungen zu besprechen, und lassen Sie uns Ihr nächstes EV-Projekt erfolgreich integrieren und in die Praxis umsetzen.
