
Интересуетесь, как CAN-шину связь соединяет сложные компоненты системы аккумулятора электромобиля системы? Вы на правильном месте, потому что я подробно объясню, как функционирует эта важная сеть. Я потратил годы на решение задач высоковольтной интеграции, и я покажу вам, почему владение этим протоколом связи обязательно для вашего транспортного средства.
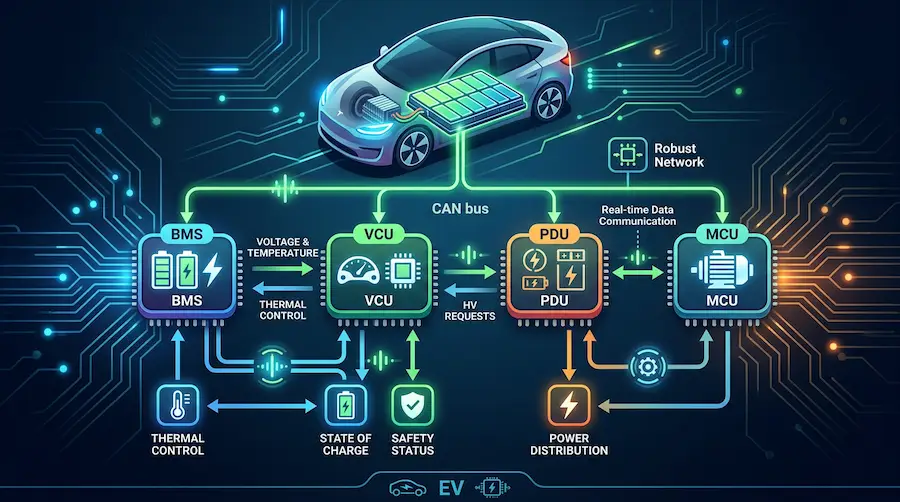
CAN (Controller Area Network) шина в системе аккумулятора электромобиля — это надежный протокол сетевого взаимодействия транспортного средства. Он позволяет микроконтроллерам, таким как BMS, PDU и VCU, обмениваться данными в реальном времени без хост-компьютера, обеспечивая безопасность аккумулятора, тепловой менеджмент и управление высоким напряжением.
Давайте подробно рассмотрим конкретные функции, компоненты и методы тестирования сетей CAN-шины. Я покажу вам, как эта важная система обеспечивает безопасную работу современных электромобилей и как избежать распространенных ошибок при интеграции.
Что такое CAN-шина простыми словами?
Рассматривайте CAN-шину как центральную нервную систему электромобиля.
В человеческом теле ваш мозг не нуждается в отдельном, выделенном нервном проводе, подключенном к каждой мышечной волокне, чтобы послать сигнал. Вместо этого он передает сигналы через общую нервную систему, и соответствующие мышцы реагируют.
CAN-шина делает именно то же самое для системы аккумулятора электромобиля.
Вместо прокладывания тяжелых, дорогих точка-точка медных проводов между каждым датчиком и контроллером, все электронные блоки управления (ECU) транслируют свои сообщения в общую двухпроводную сеть.
Любое устройство в сети может “слышать” сообщения, но реагирует только на данные, которые для него актуальны.

Например, когда система управления аккумулятором (BMS) обнаруживает, что литий-ионный аккумулятор аккумуляторный блок слишком нагревается, она транслирует сообщение по шине CAN. Тепловая система автомобиля слышит это сообщение и мгновенно запускает насосы жидкостного охлаждения.
Это происходит за миллисекунды. Это невероятно надежно, высоко устойчиво к электромагнитным помехам и в корне уменьшает вес и сложность проводки автомобиля.
CAN-шина против автомобильной Ethernet-сети
Если вы системный архитектор или инженер-электрик, возможно, вы задаетесь вопросом, стоит ли оставаться на CAN или перейти на автомобильную Ethernet.
Вот правда: оба варианта имеют свое место, но служат совершенно разным целям.
Шина CAN (и ее более быстрая версия, CAN FD) является детерминированной. Это означает, что сообщения гарантированно приходят в очень предсказуемые, строгие сроки. Она создана для абсолютной надежности и отказоустойчивости в условиях сильных помех.
Автомобильная Ethernet, с другой стороны, предназначена для огромной пропускной способности. Она может обрабатывать до 10 Гбит/с, что делает ее идеальной для систем расширенного водительского ассистирования (ADAS), LIDAR и потоков видео высокой четкости.
Давайте посмотрим на краткое сравнение:
Скорость: CAN достигает максимум 1 Мбит/с (или до 8 Мбит/с для CAN FD). Ethernet легко достигает 1 Гбит/с до 10 Гбит/с.
Задержка: CAN является высокодетерминированной с задержкой в микросекунды для критически важных кадров безопасности. Ethernet требует сложных коммутаторов с временно-чувствительными сетями (TSN), чтобы достичь аналогичной детерминированности.
Проводка: CAN использует простую неэкранированную или экранированную витую пару. Ethernet требует более сложных, специализированных кабелей для предотвращения потери данных.
Применение в электромобилях: CAN — бесспорный лидер для систем BMS, блока распределения высоковольтной энергии (PDU), и блока управления автомобилем (VCU). Ethernet обрабатывает информационно-развлекательные системы и мозги автономного вождения.
Для основных систем питания и безопасности вашей платформы на базе аккумуляторов, шина CAN остается золотым стандартом.

Каковы цели связи CAN-шины в системе аккумулятора электромобиля?
Основная цель коммуникации CAN — обеспечить безопасную и эффективную работу литий-ионного аккумуляторного блока.
Проекты аккумуляторов часто терпят неудачу на этапе интеграции, не потому что компоненты недоступны, а потому что механические, тепловые, электрические и системы управления не разработаны как единое скоординированное решение. Шина CAN — это связующее звено, создающее эту координацию.
Вот конкретные цели, которые она выполняет:
1. Мониторинг аккумулятора в реальном времени
Система управления аккумулятором (BMS) постоянно вычисляет состояние заряда (SOC) и состояние здоровья (SOH) аккумулятора. Она передает эти данные по шине CAN, чтобы панель приборов могла отображать оставшийся запас хода, а контроллер двигателя точно знал, сколько мощности можно безопасно потреблять.
2. Запуск теплового управления
Высокопроизводительные платформы, такие как электромобили и морские суда, предъявляют строгие требования к жидкостному охлаждению. Когда температура элементов повышается во время быстрой зарядки или сильного ускорения, BMS отправляет запрос по шине CAN системе охлаждения для регулировки скорости работы насосов и положения клапанов.
3. Безопасность высокого напряжения и управление контакторами
Это PDU/HV Control Box отвечает за физическое подключение и отключение высоковольтного аккумулятора от автомобиля. Если BMS обнаружит критическую неисправность — например, тепловой разгон или серьезное превышение напряжения — он мгновенно отправляет приоритетное сообщение по шине CAN в PDU для открытия основных контакторов, отключая питание и спасая автомобиль.
4. Координация зарядки
Когда вы подключаете электромобиль, он не просто принимает питание без разбору. BMS использует шину CAN для общения с быстрым зарядным устройством постоянного тока, договариваясь о точных лимитах напряжения и тока в реальном времени, чтобы предотвратить деградацию элементов.
Как работает связь CAN-шины в системе аккумулятора электромобиля?
Чтобы понять, как это работает, нужно понять две ключевые концепции: дифференциальную сигнализацию и арбитраж сообщений.

Во-первых, CAN использует два провода: CAN_High и CAN_Low.
Когда модуль хочет отправить цифровое “1” (рецессивный бит), оба провода находятся на уровне 2,5 вольт. Когда он хочет отправить цифровое “0” (доминирующий бит), CAN_High поднимается до 3,5 вольт, а CAN_Low опускается до 1,5 вольт.
Поскольку система считывает разницу напряжения между двумя проводами, она обладает высокой устойчивостью к мощным электромагнитных помех (ЭМИ), создаваемым инверторами электромобилей с высоким напряжением. Если электромагнитный импульс попадает в кабель, он воздействует на оба провода одинаково, и разница напряжений остается точно такой же.
Во-вторых, CAN использует систему приоритетных сообщений, называемую Non-Destructive Bitwise Arbitration.
Каждое сообщение имеет идентификатор (ID). Чем ниже номер ID, тем выше приоритет.
Если система информационно-развлекательной системы пытается отправить сообщение в тот же миллисекунд, что и BMS, пытающийся отправить критическое сообщение “Перенапряжение”, система смотрит на ID. Сообщение о сбое BMS будет иметь меньший ID (более высокий приоритет). Система информационно-развлекательной системы мгновенно остановит передачу, пропустит сообщение BMS и попробует снова позже.
Это обеспечивает, что интеллектуальные управляющие сообщения всегда выигрывают гонку.
Из чего состоит связь CAN-шины в системе аккумулятора электромобиля?
Если вы инженер по интеграции транспортных средств или менеджер по закупкам запчастей, вам нужно точно знать, какое оборудование входит в эту сеть.
На высоком уровне сеть состоит из нескольких узлов, подключенных к центральной шине. В системе аккумулятора электромобиля это включает:
1. Узел системы управления аккумулятором (BMS)
Это мозг аккумулятора. Он включает контроллер CAN (который форматирует данные в кадры) и трансивер CAN (который превращает цифровые кадры в физические импульсы напряжения на проводах). Мы часто интегрируем интеллектуальные архитектуры BMS, разработанные специально для требовательных условий эксплуатации.
2. Узел PDU / HV Control Box
Это Блок распределения питания использует свой узел CAN для получения команд от VCU или BMS для закрытия цепей предварительной зарядки и основных реле.
3. Узел блока управления транспортным средством (VCU)
VСU выступает в роли главного командующего. Он принимает входные данные с педали газа и отправляет запросы на крутящий момент по CAN инвертору, одновременно проверяя данные CAN BMS, чтобы убедиться, что аккумулятор способен выдержать нагрузку.
4. Физический уровень
Это включает экранированные витые пары кабелей, стандартные автомобильные разъемы (например, TE Connectivity или Amphenol) и критические 120-омные терминальные резисторы, расположенные на двух самых дальних концах шины, чтобы предотвратить отражение сигнала.

Если вы создаете внешоссевые или специализированные транспортные средства, понять, как заставить все эти узлы взаимодействовать, чрезвычайно сложно. Производители ячеек Tier-1 созданы для массового стандартного объема и часто оставляют вас с огромной инженерной головной болью по поводу того, как заставить их исходные модули взаимодействовать с вашим транспортным средством.
Здесь незаменим партнер по интеграции «под ключ», который помогает определить архитектуру системы и беспрепятственно интегрировать коммуникацию VCU.
Каковы преимущества связи CAN-шины?
Шина CAN существует десятилетиями в автомобильной промышленности не просто так. Вот почему она остается лучшим выбором для систем аккумуляторов электромобилей:
Крайняя надежность: Дифференциальная сигнализация, о которой я упоминал ранее, делает ее практически неуязвимой к электромагнитным помехам, создаваемым высоковольтными электродвигателями электромобилей.
Снижение веса и стоимости: Используя одну скрученную пару проводов для десятков устройств, производители оригинального оборудования экономят огромное количество меди. В производстве тяжелых транспортных средств это снижение веса напрямую влияет на увеличение пробега аккумулятора.
Централизованная диагностика: Поскольку каждое сообщение передается по одному и тому же шине, техник может подключить сканер OBD-II к одному порту и одновременно проверить состояние BMS, PDU и системы охлаждения.
Масштабируемость Plug-and-Play: Нужно добавить дополнительный логгер данных или вторичный дисплей? Не нужно переделывать всю электросистему. Просто подключитесь к существующей шине CAN и запрограммируйте новое устройство на прослушивание нужных идентификаторов.
Каковы недостатки связи CAN-шины?
Несмотря на свою гениальность, CAN не идеален. Если вы CTO или руководитель отдела исследований и разработок, разрабатывающий платформу следующего поколения, вы должны знать о следующих ограничениях:
Ограниченная пропускная способность: Классический CAN достигает максимум 1 Мбит/с. Это достаточно для команд реле и измерений температуры, но он начинает тормозить при попытке передачи больших объемов данных, таких как графики импедансной спектроскопии батареи или видеопотоки с камер.
Уязвимости в безопасности: CAN был разработан для надежности, а не для кибербезопасности. В нем отсутствует встроенное шифрование. Если злоумышленник получит доступ к шине, он легко сможет подделать сообщения — например, приказать PDU открыть контакторы высокого напряжения во время движения автомобиля по трассе.
Проблемы с нагрузкой сети: Если к одной шине подключить слишком много устройств (узлов), использование сети может превысить допустимый уровень. В этом случае сообщения с низким приоритетом постоянно блокируются более важными, что приводит к потере кадров и задержкам системы.
Как проверить связь CAN-шины в системе аккумулятора электромобиля?
Если вы инженер по тестированию или менеджер проекта, отвечающий за финальную развертку, вы не можете просто надеяться на удачу и надеяться, что связь будет работать.
Тщательное тестирование — обязательный этап, особенно для приложений, таких как электромонтажные машины для добычи или морские суда, требующие очень надежных и взрывобезопасных систем. .
Вот как профессионалы тестируют сеть CAN:

1. Тестирование физического уровня
Перед тем как перейти к программному обеспечению, я всегда использую осциллограф. Я проверяю линии CAN_High и CAN_Low, чтобы убедиться, что напряжение в состоянии покоя точно составляет 2,5 В. Я ищу чистые, квадратные импульсы без закругленных краев или всплесков электрического шума. Также я использую мультиметр с выключенным питанием, чтобы убедиться, что сопротивление шины точно составляет 60 Ом (два параллельно подключенных резистора по 120 Ом).
2. Тестирование протокольного уровня
Затем я подключаю инструмент для перехвата CAN, например, Vector CANalyzer или интерфейс PCAN-USB. Это позволяет мне считывать необработанный шестнадцатеричный трафик на ноутбуке. Я проверяю, правильно ли BMS передает свои 11-битные или 29-битные CAN-идентификаторы с правильными временами цикла (например, каждые 10 или 100 миллисекунд).
3. Тестирование инжекции ошибок
Вы должны знать, как система реагирует, когда что-то идет не так. Я намеренно замкную провод CAN_High на землю, чтобы проверить, успешно ли BMS регистрирует сбой связи и входит ли транспортное средство в безопасный режим “лимп”.”
Производство всегда должно руководствоваться протоколами тестирования на этапе окончания сборки 100% (End-of-Line, EOL), чтобы выявить эти проблемы интеграции до их попадания в эксплуатацию.
Заключение
Понимание коммуникации CAN-шины — ключ к обеспечению безопасного, надежного и интеллектуального управления любой системы аккумуляторов электромобиля. Это мост между сырой химией элементов и общей стратегией управления вашего индивидуального транспортного средства.
Однако интеграция интеллектуальной системы управления батареей (BMS), высоковольтный PDU, и бесшовная коммуникация VCU в полностью сертифицированную, готовую к подключению энергетическую систему — это огромная инженерная задача.
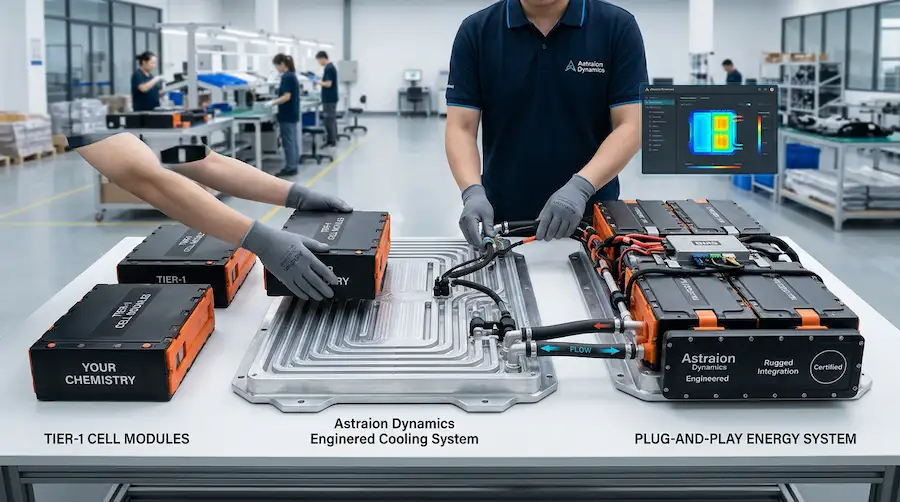
Если вы инженер по интеграции транспортных средств, испытывающий трудности с надежной связью модулей батареи уровня Tier-1 с вашей тяжелой, морской или внешоссейной платформой, вам может понадобиться инженерный партнер по интеграции.
At Astraion Dynamics, наша бизнес-модель проста: Вы контролируете химию, мы — инженерное мастерство. Мы поддерживаем программы систем батарей от концепции до пусконаладочных работ, обеспечивая безупречную архитектуру CAN и готовность к развертыванию.
Свяжитесь с нашей инженерной командой сегодня чтобы обсудить ограничения вашей платформы, и давайте успешно интегрируем ваш следующий проект электромобиля и выведем его в поле.
