
Vous vous demandez comment CAN bus la communication connecte les composants complexes d'un système de batterie de VE Vous êtes au bon endroit, car je vais décomposer exactement comment ce système réseau critique fonctionne. J'ai passé des années à résoudre des défis d'intégration haute tension, et je vais vous montrer pourquoi maîtriser ce protocole de communication est indispensable pour votre véhicule.
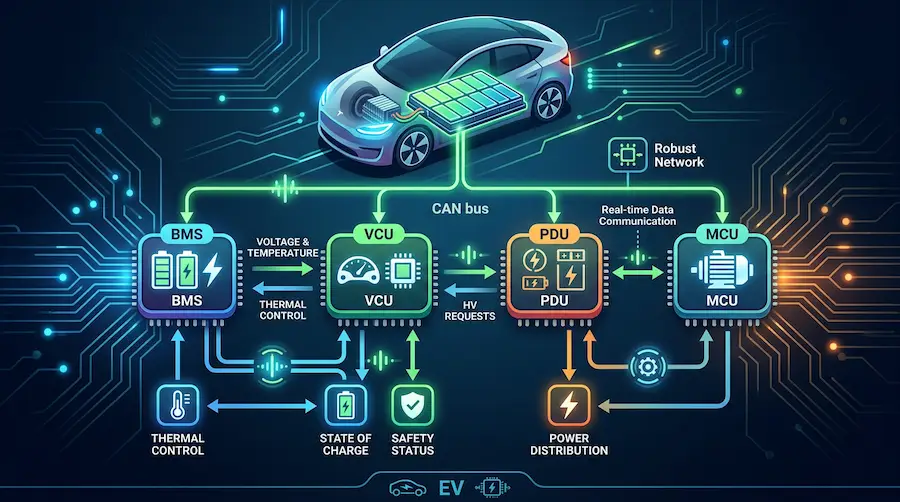
Le bus CAN (Controller Area Network) dans un système de batterie de VE est un protocole de réseau robuste pour véhicules. Il permet aux microcontrôleurs comme le BMS, le PDU et le VCU de communiquer et de partager des données en temps réel sans ordinateur hôte, garantissant la sécurité de la batterie, la gestion thermique et le contrôle haute tension.
Plongeons en profondeur dans les fonctions spécifiques, les composants et les méthodes de test des réseaux CAN bus. Je vais vous montrer exactement comment ce système critique maintient la sécurité des véhicules électriques modernes en fonctionnement, et comment éviter les défaillances courantes d'intégration.
Qu'est-ce que le bus CAN en termes simples ?
Considérez le bus CAN comme le système nerveux central d'un véhicule électrique.
Dans le corps humain, votre cerveau n'a pas besoin d'un fil nerveux dédié séparé connecté à chaque fibre musculaire pour envoyer un signal. Au lieu de cela, il envoie des signaux via un système nerveux partagé, et les muscles appropriés réagissent.
Le bus CAN fait exactement la même chose pour un système de batterie de VE.
Au lieu de faire passer un câblage en cuivre lourd, coûteux et point à point entre chaque capteur et contrôleur, toutes les unités de contrôle électronique (ECU) diffusent leurs messages sur un réseau partagé à deux fils.
Tout dispositif sur le réseau peut “entendre” les messages, mais ils n’agissent que sur les données qui leur sont pertinentes.

Par exemple, lorsque le système de gestion de la batterie (BMS) detecte que la batterie au lithium-ion pack de batterie chauffe trop, il diffuse un message sur le bus CAN. Le système de gestion thermique du véhicule entend ce message et active instantanément les pompes de refroidissement liquide.
Cela se produit en millisecondes. C’est incroyablement fiable, très résistant au bruit électrique, et réduit fondamentalement le poids et la complexité du faisceau de câblage du véhicule.
CAN Bus vs Ethernet Automobile
Si vous êtes architecte systèmes ou ingénieur électrique, vous vous demandez peut-être si vous devriez rester avec le CAN ou passer à l’Ethernet automobile.
Voici la vérité : les deux ont leur place, mais ils servent des objectifs totalement différents.
Le bus CAN (et son frère plus rapide, CAN FD) est déterministe. Cela signifie que les messages sont garantis d’arriver dans un délai très prévisible et strict. Il est conçu pour une fiabilité absolue et une tolérance aux fautes dans des environnements à bruit élevé.
L’Ethernet automobile, en revanche, est conçu pour un débit massif. Il peut gérer jusqu’à 10 Gbps, ce qui le rend parfait pour les systèmes avancés d’aide à la conduite (ADAS), LIDAR, et flux vidéo haute définition.
Examinons une comparaison rapide :
Vitesse : CAN atteint un maximum de 1 Mbps (ou jusqu’à 8 Mbps pour CAN FD). L’Ethernet pousse facilement de 1 Gbps à 10 Gbps.
Latence : CAN est très déterministe avec une latence de microsecondes pour les trames de sécurité critiques. L’Ethernet nécessite des commutateurs de réseau sensibles au temps (TSN) complexes pour atteindre une déterminisme similaire.
Câblage : CAN utilise une paire torsadée simple non blindée ou blindée. Ethernet nécessite un câblage plus complexe et spécialisé pour éviter la perte de données.
Application dans les VE : CAN est le roi incontesté pour le BMS, l'Unité de Distribution d'Énergie Haute Tension (PDU), et l'Unité de Contrôle du Véhicule (VCU). Ethernet gère l'infodivertissement et le cerveau de la conduite autonome.
Pour les systèmes électriques et de sécurité principaux de votre plateforme alimentée par batterie, le bus CAN reste la norme d'or.

Quels sont les objectifs de la communication CAN Bus dans un système de batterie de VE ?
L'objectif principal de la communication CAN est de garantir que le pack de batteries lithium-ion fonctionne en toute sécurité et efficacité.
Les projets de batteries échouent souvent lors de l'intégration, non pas parce que les composants sont indisponibles, mais parce que les systèmes mécaniques, thermiques, électriques et de contrôle ne sont pas développés comme une solution coordonnée. Le bus CAN est la colle qui crée cette coordination.
Voici les objectifs spécifiques qu'il sert :
1. Surveillance en Temps Réel de la Batterie
Le BMS calcule en permanence l'État de Charge (SOC) et l'État de Santé (SOH) de la batterie. Il diffuse ces données via le bus CAN afin que le tableau de bord affiche votre autonomie restante, et que le contrôleur moteur sache exactement quelle quantité de puissance il peut tirer en toute sécurité.
2. Déclenchement de la Gestion Thermique
Les plateformes haute performance, comme les camions électriques et les navires marins, ont des exigences strictes en matière de refroidissement liquide. Lorsque la température des cellules augmente lors de la charge rapide ou d'une accélération forte, le BMS envoie une requête CAN au système de refroidissement pour ajuster la vitesse des pompes et la position des vannes.
3. Sécurité Haute Tension et Contrôle des Contacteurs
Le Boîte de Contrôle PDU/HV est responsable de connecter et déconnecter physiquement la batterie haute tension du véhicule. Si le BMS détecte une défaillance critique — comme un événement de thermal runaway ou une surtension grave — il envoie instantanément un message CAN de haute priorité au PDU pour ouvrir les contacteurs principaux, coupant l'alimentation pour sauver le véhicule.
4. Coordination de la Charge
Lorsque vous branchez un VE, le véhicule n'accepte pas simplement l'énergie de manière aveugle. Le BMS utilise le bus CAN pour communiquer avec le chargeur rapide DC, négociant en temps réel les limites exactes de tension et de courant afin de prévenir la dégradation des cellules.
Comment fonctionne la communication CAN Bus dans un système de batterie de VE ?
Pour comprendre comment cela fonctionne, vous devez connaître deux concepts clés : la signalisation différentielle et l'arbitrage des messages.

Tout d'abord, CAN utilise deux fils : CAN_High et CAN_Low.
Lorsqu'un module souhaite envoyer un “ 1 ” numérique (bit récessif), les deux fils sont à 2,5 volts. Lorsqu'il veut envoyer un “ 0 ” numérique (bit dominant), CAN_High passe à 3,5 volts et CAN_Low chute à 1,5 volts.
Parce que le système lit la différence de tension entre les deux fils, il est fortement immunisé contre le électromagnétiques (EMI) généré par les inverseurs EV à haute tension. Si une impulsion électromagnétique frappe le câble, elle frappe les deux fils de manière égale, et la différence de tension reste exactement la même.
Deuxièmement, CAN utilise un système de messagerie basé sur la priorité appelé Arbitrage binaire non destructif.
Chaque message possède un identifiant (ID). Plus le numéro d'ID est faible, plus la priorité est élevée.
Si le système d'infodivertissement tente d'envoyer un message au même milliseconde que le BMS tente d'envoyer un message critique “ Défaut de surtension ”, le système regarde les ID. Le message de défaut du BMS aura un ID plus faible (priorité plus élevée). Le système d'infodivertissement cessera instantanément de transmettre, laissera passer le message du BMS, puis réessaiera plus tard.
Cela garantit que les messages de contrôle intelligents remportent toujours la course.
De quoi se compose la communication CAN Bus dans un système de batterie de VE ?
Si vous êtes ingénieur en intégration de véhicules ou responsable des achats de pièces, vous devez connaître précisément la composition matérielle de ce réseau.
À un niveau élevé, le réseau se compose de plusieurs nœuds connectés à un bus central. Dans un système de batterie de VE, cela consiste en :
1. Le nœud du système de gestion de la batterie (BMS)
C'est le cerveau de la batterie. Il comprend un contrôleur CAN (qui formate les données en trames) et un transceiver CAN (qui transforme les trames numériques en impulsions de tension physiques sur les fils). Nous intégrons souvent des architectures BMS intelligentes conçues spécifiquement pour des environnements exigeants.
2. Le nœud PDU / Boîtier de contrôle HV
Le Unité de distribution d'énergie utilise son nœud CAN pour recevoir des commandes du VCU ou du BMS afin de fermer les circuits de pré-charge et les relais principaux.
3. Le nœud de l'unité de contrôle du véhicule (VCU)
Le VCU agit en tant que commandant principal. Il prend des entrées du pédalier d'accélérateur et envoie des demandes de couple CAN à l'inverseur, tout en vérifiant simultanément les données CAN du BMS pour s'assurer que la batterie peut supporter la charge.
4. La couche physique
Cela inclut les câbles torsadés blindés, les connecteurs automobiles standard (comme TE Connectivity ou Amphenol), et les résistances de terminaison critiques de 120 ohms situées aux deux extrémités du bus pour éviter la réflexion du signal.

Si vous construisez des véhicules hors-route ou spécialisés, déterminer comment faire communiquer tous ces nœuds entre eux est extrêmement difficile. Les fabricants de cellules de niveau 1 sont conçus pour un volume standard massif et vous laissent souvent avec un casse-tête d'ingénierie énorme concernant la communication de leurs modules bruts avec votre véhicule.
C'est là qu'un partenaire d'intégration clé en main devient inestimable, aidant à définir l'architecture du système et à intégrer la communication du VCU de manière transparente.
Quels sont les avantages de la communication CAN Bus ?
Le bus CAN a survécu pendant des décennies dans l'industrie automobile pour une raison. Voici pourquoi il reste le choix absolu pour les systèmes de batteries de VE :
Fiabilité extrême : Le signal différentiel dont j'ai parlé plus tôt le rend pratiquement à l'épreuve des EMI générés par les moteurs électriques haute tension.
Réduction du poids et du coût : En utilisant une seule paire torsadée de fils pour des dizaines d'appareils, les fabricants d'équipements d'origine économisent une quantité massive de cuivre. Dans la fabrication de véhicules lourds, cette réduction de poids se traduit directement par une meilleure autonomie de la batterie.
Diagnostic Centralisé : Parce que chaque message circule sur le même bus, un technicien peut brancher un scanner OBD-II sur un seul port et lire simultanément l'état du BMS, du PDU et du système de refroidissement.
Évolutivité Plug-and-Play : Besoin d'ajouter un enregistreur de données supplémentaire ou un affichage secondaire ? Vous n'avez pas besoin de reconfigurer tout le véhicule. Il suffit de se connecter au bus CAN existant et de programmer le nouvel appareil pour écouter les bons identifiants.
Quels sont les inconvénients de la communication CAN Bus ?
Malgré son ingéniosité, le CAN n'est pas parfait. Si vous êtes un CTO ou un Directeur R&D planifiant votre plateforme de nouvelle génération, vous devez connaître ces limitations :
Bande passante limitée : Le CAN classique atteint un maximum de 1 Mbps. C'est suffisant pour les commandes de relais et les lectures de température, mais il se bloque si vous essayez de transmettre de grands ensembles de données, comme des graphiques de spectroscopie d'impédance de batterie ou des flux vidéo de caméras.
Vulnérabilités de sécurité : Le CAN a été conçu pour la fiabilité, pas pour la cybersécurité. Il manque de chiffrement natif. Si un acteur malveillant accède au bus, il peut facilement usurper des messages — par exemple, demander au PDU d'ouvrir les contacteurs haute tension pendant que le véhicule circule sur l'autoroute.
Problèmes de charge du réseau : Si vous ajoutez trop d'appareils (nœuds) à un seul bus, l'utilisation du réseau peut dépasser 70%. Lorsque cela se produit, les messages de priorité inférieure sont constamment bloqués par ceux de priorité supérieure, entraînant des pertes de trames et un retard du système.
Comment tester la communication CAN Bus dans un système de batterie de VE ?
Si vous êtes un Ingénieur Test ou un Chef de Projet supervisant le déploiement final, vous ne pouvez pas simplement croiser les doigts en espérant que la communication fonctionne.
Des tests rigoureux sont une étape obligatoire, en particulier pour des applications comme les véhicules miniers électriques ou les navires marins qui exigent des systèmes hautement fiables et antidéflagrants. .
Voici comment les professionnels testent le réseau CAN :

1. Test de la couche physique
Avant d'examiner le logiciel, je prends toujours un oscilloscope. Je probe les lignes CAN_High et CAN_Low pour m'assurer que la tension à l'état de repos est exactement de 2,5 V. Je recherche des impulsions de tension propres, carrées, sans bords arrondis ni pics de bruit électrique. J'utilise également un multimètre avec l'alimentation coupée pour vérifier que la résistance du bus mesure exactement 60 ohms (deux résistances de 120 ohms en parallèle).
2. Test de la couche protocolaire
Ensuite, je branche un outil d'écoute CAN, comme un Vector CANalyzer ou une interface PCAN-USB. Cela me permet de lire le trafic hexadécimal brut sur un ordinateur portable. Je vérifie si le BMS transmet correctement ses identifiants CAN à 11 bits ou 29 bits à des cycles corrects (par exemple, toutes les 10 ou 100 millisecondes).
3. Test d'injection de défauts
Vous devez savoir comment le système réagit lorsque des problèmes surviennent. Je vais intentionnellement court-circuiter le fil CAN_High à la masse pour voir si le BMS enregistre avec succès une panne de communication et si le véhicule entre en mode “ limpe ” sécurisé.”
La fabrication doit toujours être régie par les protocoles de test de fin de ligne (EOL) 100% pour détecter ces problèmes d'intégration avant qu'ils n'atteignent le terrain.
Conclusion
Comprendre la communication CAN bus est la clé pour débloquer un contrôle sûr, fiable et intelligent dans tout système de batterie EV. Il comble le fossé entre la chimie brute des cellules et la stratégie de contrôle globale de votre véhicule personnalisé.
Cependant, intégrer un BMS intelligent, un PDU haute tension, et une communication VCU transparente dans un système d'énergie entièrement certifié, prêt à brancher, est un défi d'ingénierie énorme.
Si vous êtes un ingénieur en intégration de véhicules ayant du mal à faire communiquer de manière fiable des modules de batterie de niveau 1 avec votre plateforme lourde, marine ou hors-route, vous pourriez avoir besoin d'un partenaire d'intégration axé sur l'ingénierie.
At Astraion Dynamics, notre modèle économique est simple : vous contrôlez la chimie, nous maîtrisons l'ingénierie. Nous soutenons les programmes de systèmes de batteries de la conception à la mise en service, en veillant à ce que votre architecture CAN soit parfaite et prête pour le déploiement.
Contactez notre équipe d'ingénierie dès aujourd'hui pour discuter des contraintes de votre plateforme, et faisons en sorte que votre prochain projet EV soit intégré avec succès et déployé sur le terrain.
