
¿Te preguntas cómo bus CAN la comunicación conecta los componentes complejos de un batería de vehículo eléctrico ¿Sistema? Estás en el lugar correcto, porque voy a desglosar exactamente cómo funciona esta red crítica. He dedicado años a resolver desafíos de integración de alta tensión, y te mostraré por qué dominar este protocolo de comunicación es innegociable para tu vehículo.
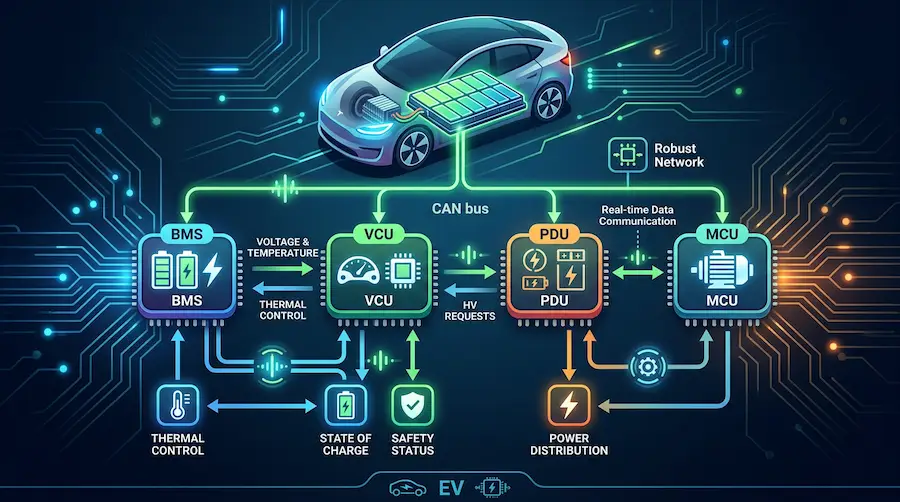
El bus CAN (Controller Area Network) en un sistema de batería de vehículo eléctrico es un protocolo de red robusto para vehículos. Permite que microcontroladores como el BMS, PDU y VCU se comuniquen y compartan datos en tiempo real sin necesidad de una computadora anfitriona, asegurando la seguridad de la batería, la gestión térmica y el control de alta tensión.
Vamos a profundizar en las funciones específicas, componentes y métodos de prueba de las redes de bus CAN. Te mostraré exactamente cómo este sistema crítico mantiene en funcionamiento de manera segura los vehículos eléctricos modernos, y cómo puedes evitar fallos comunes de integración.
¿Qué es el bus CAN en términos sencillos?
Piensa en el bus CAN como el sistema nervioso central de un vehículo eléctrico.
En el cuerpo humano, tu cerebro no necesita un cable nervioso separado y dedicado conectado a cada fibra muscular para enviar una señal. En cambio, envía señales a través de un sistema nervioso compartido, y los músculos adecuados reaccionan.
El bus CAN hace exactamente lo mismo para un sistema de batería de vehículo eléctrico.
En lugar de instalar cableado de cobre pesado, costoso y punto a punto entre cada sensor y controlador, todas las unidades de control electrónico (ECUs) transmiten sus mensajes en una red compartida de dos hilos.
Cualquier dispositivo en la red puede “escuchar” los mensajes, pero solo actúan sobre los datos que son relevantes para ellos.

Por ejemplo, cuando el Sistema de Gestión de Baterías (BMS) detecta que la batería de iones de litio paquete de baterías se está calentando demasiado, transmite un mensaje en el bus CAN. El sistema de gestión térmica del vehículo escucha este mensaje y activa instantáneamente las bombas de refrigeración líquida.
Esto sucede en milisegundos. Es increíblemente fiable, altamente resistente al ruido eléctrico y reduce fundamentalmente el peso y la complejidad del cableado del vehículo.
Bus CAN vs Ethernet Automotriz
Si eres un Arquitecto de Sistemas o un Ingeniero Eléctrico, quizás te preguntes si deberías quedarte con CAN o pasar a Ethernet Automotriz.
Aquí está la verdad: ambos tienen su lugar, pero sirven a propósitos completamente diferentes.
El bus CAN (y su hermano más rápido, CAN FD) es determinista. Esto significa que los mensajes se garantizan que lleguen dentro de un plazo altamente predecible y estricto. Está diseñado para una fiabilidad absoluta y tolerancia a fallos en entornos con mucho ruido.
Por otro lado, Ethernet Automotriz está diseñado para un ancho de banda masivo. Puede manejar hasta 10 Gbps, lo que lo hace perfecto para Sistemas Avanzados de Asistencia al Conductor (ADAS), LIDAR y transmisiones de video en alta definición.
Veamos una comparación rápida:
Velocidad: CAN alcanza un máximo de 1 Mbps (o hasta 8 Mbps para CAN FD). Ethernet fácilmente supera los 1 Gbps hasta 10 Gbps.
Latencia: CAN es altamente determinista con una latencia de microsegundos para marcos críticos de seguridad. Ethernet requiere conmutadores complejos de redes sensibles al tiempo (TSN) para lograr una determinación similar.
Cableado: CAN utiliza un par trenzado simple sin blindar o blindado. Ethernet requiere cableado más complejo y especializado para prevenir la pérdida de datos.
Aplicación en vehículos eléctricos: CAN es el rey indiscutible para el BMS, Unidad de Distribución de Energía de Alta Tensión (PDU), y Unidad de Control del Vehículo (VCU). Ethernet se encarga del infoentretenimiento y del cerebro de conducción autónoma.
Para los sistemas principales de energía y seguridad de tu plataforma alimentada por batería, el bus CAN sigue siendo el estándar de oro.

¿Cuáles son los propósitos de la comunicación por bus CAN en un sistema de batería de vehículo eléctrico?
El propósito principal de la comunicación CAN es garantizar que el paquete de baterías de iones de litio funcione de manera segura y eficiente.
Los proyectos de baterías a menudo fracasan en la etapa de integración, no porque los componentes no estén disponibles, sino porque los sistemas mecánicos, térmicos, eléctricos y de control no están desarrollados como una solución coordinada. El bus CAN es la unión que crea esta coordinación.
Aquí están los propósitos específicos que cumple:
1. Monitoreo en Tiempo Real de la Batería
El BMS calcula constantemente el Estado de Carga (SOC) y el Estado de Salud (SOH) de la batería. Transmite estos datos a través del bus CAN para que el panel de instrumentos pueda mostrar tu autonomía restante, y el controlador del motor sepa exactamente cuánta potencia puede extraer de manera segura.
2. Activación de la Gestión Térmica
Las plataformas de alto rendimiento, como camiones eléctricos y embarcaciones marinas, tienen requisitos estrictos para la refrigeración líquida. Cuando las temperaturas de las celdas aumentan durante cargas rápidas o aceleraciones intensas, el BMS envía una solicitud por CAN al sistema de refrigeración para ajustar las velocidades de las bombas y las posiciones de las válvulas.
3. Seguridad de Alta Tensión y Control de Contactores
El Caja de Control PDU/HV es responsable de conectar y desconectar físicamente la batería de alta tensión del vehículo. Si el BMS detecta una falla crítica—como un evento de fuga térmica o un sobrevoltaje severo—envía instantáneamente un mensaje CAN de alta prioridad a la PDU para abrir los contactores principales, cortando la energía y salvando el vehículo.
4. Coordinación de Carga
Cuando conectas un vehículo eléctrico, este no acepta la energía ciegamente. El BMS usa el bus CAN para comunicarse con el cargador rápido de corriente continua, negociando en tiempo real los límites exactos de voltaje y corriente para prevenir la degradación de las celdas.
¿Cómo funciona la comunicación por bus CAN en un sistema de batería de vehículo eléctrico?
Para entender cómo funciona, necesitas comprender dos conceptos clave: señalización diferencial y arbitraje de mensajes.

Primero, CAN usa dos cables: CAN_Alto y CAN_Bajo.
Cuando un módulo quiere enviar un “1” digital (bit recesivo), ambos cables se sitúan a 2.5 voltios. Cuando quiere enviar un “0” digital (bit dominante), CAN_High salta a 3.5 voltios y CAN_Low cae a 1.5 voltios.
Debido a que el sistema lee la diferencia de voltaje entre los dos cables, es altamente inmune a la masiva interferencia electromagnética (EMI) generada por inversores de vehículos eléctricos de alto voltaje. Si un pico electromagnético golpea el cable, golpea ambos cables por igual y la diferencia de voltaje permanece exactamente la misma.
En segundo lugar, CAN utiliza un sistema de mensajes basado en prioridades llamado Arbitraje Binario No Destructivo.
Cada mensaje tiene un identificador (ID). Cuanto menor sea el número de ID, mayor será la prioridad.
Si el sistema de infoentretenimiento intenta enviar un mensaje en el mismo milisegundo en que el BMS intenta enviar un mensaje crítico de “Fallo por Sobrevoltaje”, el sistema mira los IDs. El mensaje de fallo del BMS tendrá un ID más bajo (mayor prioridad). El sistema de infoentretenimiento detendrá instantáneamente la transmisión, permitirá que pase el mensaje del BMS y luego intentará de nuevo más tarde.
Esto asegura que los mensajes de control inteligente siempre ganen la carrera.
¿De qué consta la comunicación por bus CAN en un sistema de batería de vehículo eléctrico?
Si eres un Ingeniero de Integración de Vehículos o un Gerente de Compras que busca piezas, necesitas saber exactamente qué hardware compone esta red.
A un nivel alto, la red consiste en múltiples nodos conectados a un bus central. En un sistema de batería de vehículo eléctrico, esto consiste en:
1. El Nodo del Sistema de Gestión de Baterías (BMS)
Este es el cerebro de la batería. Incluye un controlador CAN (que formatea los datos en tramas) y un transceptor CAN (que convierte las tramas digitales en pulsos de voltaje físicos en los cables). A menudo integramos arquitecturas inteligentes de BMS diseñadas específicamente para entornos exigentes 3.
2. El Nodo del PDU / Caja de Control de Alta Tensión
El Unidad de Distribución de Energía utiliza su nodo CAN para recibir comandos del VCU o BMS para cerrar circuitos de pre-carga y relés principales.
3. El Nodo de la Unidad de Control del Vehículo (VCU)
El VCU actúa como el comandante principal. Toma entradas del pedal del acelerador y envía solicitudes de torque CAN al inversor, mientras verifica simultáneamente los datos CAN del BMS para asegurar que la batería pueda soportar la carga.
4. La Capa Física
Esto incluye los cables trenzados blindados, conectores automotrices estándar (como TE Connectivity o Amphenol) y las resistencias de terminación críticas de 120 ohmios ubicadas en los dos extremos más alejados del bus para prevenir reflexiones de señal.

Si estás construyendo vehículos fuera de carretera o vehículos especializados, averiguar cómo hacer que todos estos nodos se comuniquen entre sí es increíblemente difícil. Los fabricantes de celdas de nivel 1 están diseñados para volúmenes estándar masivos y a menudo te dejan con un gran dolor de cabeza de ingeniería respecto a cómo hacer que sus módulos en bruto hablen con tu vehículo.
Aquí es donde un socio de integración llave en mano se vuelve invaluable, ayudando a definir la arquitectura del sistema e integrando la comunicación del VCU de manera fluida.
¿Cuáles son los beneficios de la comunicación por bus CAN?
El bus CAN ha sobrevivido durante décadas en la industria automotriz por una razón. Aquí está por qué sigue siendo la mejor opción absoluta para los sistemas de baterías de vehículos eléctricos:
Extrema Fiabilidad: La señalización diferencial que mencioné anteriormente la hace prácticamente a prueba de fallos contra la EMI generada por los motores eléctricos de alta tensión.
Peso y costo reducidos: Al usar un solo par trenzado de cables para docenas de dispositivos, los fabricantes de equipos originales ahorran una cantidad enorme de cobre. En la fabricación de vehículos pesados, esta reducción de peso se traduce directamente en una mejor autonomía de la batería.
Diagnóstico centralizado: Debido a que cada mensaje viaja a través del mismo bus, un técnico puede conectar un escáner OBD-II en un solo puerto y leer el estado de la BMS, el PDU y el sistema de refrigeración al mismo tiempo.
Escalabilidad Plug-and-Play: ¿Necesitas agregar un registrador de datos adicional o una pantalla secundaria? No necesitas volver a cablear todo el vehículo. Solo te conectas al bus CAN existente y programas el nuevo dispositivo para escuchar las IDs correctas.
¿Cuáles son las desventajas de la comunicación por bus CAN?
A pesar de su brillantez, CAN no es perfecto. Si eres un CTO o Director de I+D planificando tu plataforma de próxima generación, debes ser consciente de estas limitaciones:
Ancho de banda limitado: El CAN clásico alcanza un máximo de 1 Mbps. Aunque es suficiente para comandos de relé y lecturas de temperatura, se bloquea si intentas transmitir grandes conjuntos de datos, como gráficos de espectroscopía de impedancia de batería o transmisiones de cámaras.
Vulnerabilidades de seguridad: El CAN fue diseñado para la fiabilidad, no para la ciberseguridad. Carece de cifrado nativo. Si un actor malicioso accede al bus, puede “suplantar” mensajes fácilmente, por ejemplo, diciendo al PDU que abra los contactores de alta tensión mientras el vehículo circula por la autopista.
Problemas de carga de la red: Si añades demasiados dispositivos (nodos) a un solo bus, la utilización de la red puede superar el 70%. Cuando esto sucede, los mensajes de menor prioridad se bloquean constantemente por los de mayor prioridad, lo que provoca pérdida de cuadros y retrasos en el sistema.
¿Cómo probar la comunicación por bus CAN en un sistema de batería de vehículo eléctrico?
Si eres un Ingeniero de Pruebas o Gerente de Programa supervisando el despliegue final, no puedes simplemente cruzar los dedos y esperar que la comunicación funcione.
Las pruebas rigurosas son un paso obligatorio, especialmente para aplicaciones como vehículos mineros eléctricos o embarcaciones marinas que demandan sistemas altamente fiables y a prueba de explosiones. .
Así es como los profesionales prueban la red CAN:

1. Pruebas de la capa física
Antes de mirar el software, siempre uso un osciloscopio. Examino las líneas CAN_High y CAN_Low para asegurarme de que el voltaje en reposo esté exactamente en 2.5V. Busco pulsos de voltaje limpios y cuadrados sin bordes redondeados ni picos de ruido eléctrico. También uso un multímetro con la energía apagada para asegurarme de que la resistencia del bus mida exactamente 60 ohmios (dos resistencias de 120 ohmios en paralelo).
2. Pruebas de la capa de protocolo
A continuación, conecto una herramienta de escucha CAN, como un Vector CANalyzer o una interfaz PCAN-USB. Esto me permite leer el tráfico hexadecimal en bruto en un portátil. Verifico si el BMS está transmitiendo correctamente sus IDs CAN de 11 bits o 29 bits en los tiempos de ciclo adecuados (por ejemplo, cada 10 o 100 milisegundos).
3. Prueba de inyección de fallos
Debes saber cómo reacciona el sistema cuando las cosas van mal. Intencionalmente, conectaré el cable CAN_High a tierra para ver si el BMS registra con éxito una falla de pérdida de comunicación y si el vehículo entra en un modo de emergencia seguro.“
La fabricación siempre debe regirse por los protocolos de prueba de línea de producción 100% End-of-Line (EOL) para detectar estos problemas de integración antes de que lleguen al campo.
Conclusión
Entender la comunicación en el bus CAN es la clave para desbloquear un control seguro, fiable e inteligente en cualquier sistema de baterías de vehículo eléctrico. Conecta la química de las celdas en bruto con la estrategia de control general de tu vehículo personalizado.
Sin embargo, integrar un BMS inteligente, un PDU de alto voltaje, y una comunicación VCU fluida en un sistema de energía completamente certificado, plug-and-play, es un enorme desafío de ingeniería.
Si eres un Ingeniero de Integración de Vehículos que lucha por hacer que los módulos de batería de nivel 1 hablen de manera fiable con tu plataforma pesada, marina o fuera de carretera, quizás necesites un socio de integración impulsado por ingeniería.
At Dinámica Astraion, nuestro modelo de negocio es simple: Tú controlas la química, nosotros dominamos la ingeniería. Apoyamos programas de sistemas de baterías desde el concepto hasta la puesta en marcha, asegurando que tu arquitectura CAN sea perfecta y esté lista para su despliegue.
Contacta hoy con nuestro equipo de ingeniería para discutir las limitaciones de tu plataforma, y hagamos que tu próximo proyecto de vehículo eléctrico se integre con éxito y salga al campo.
