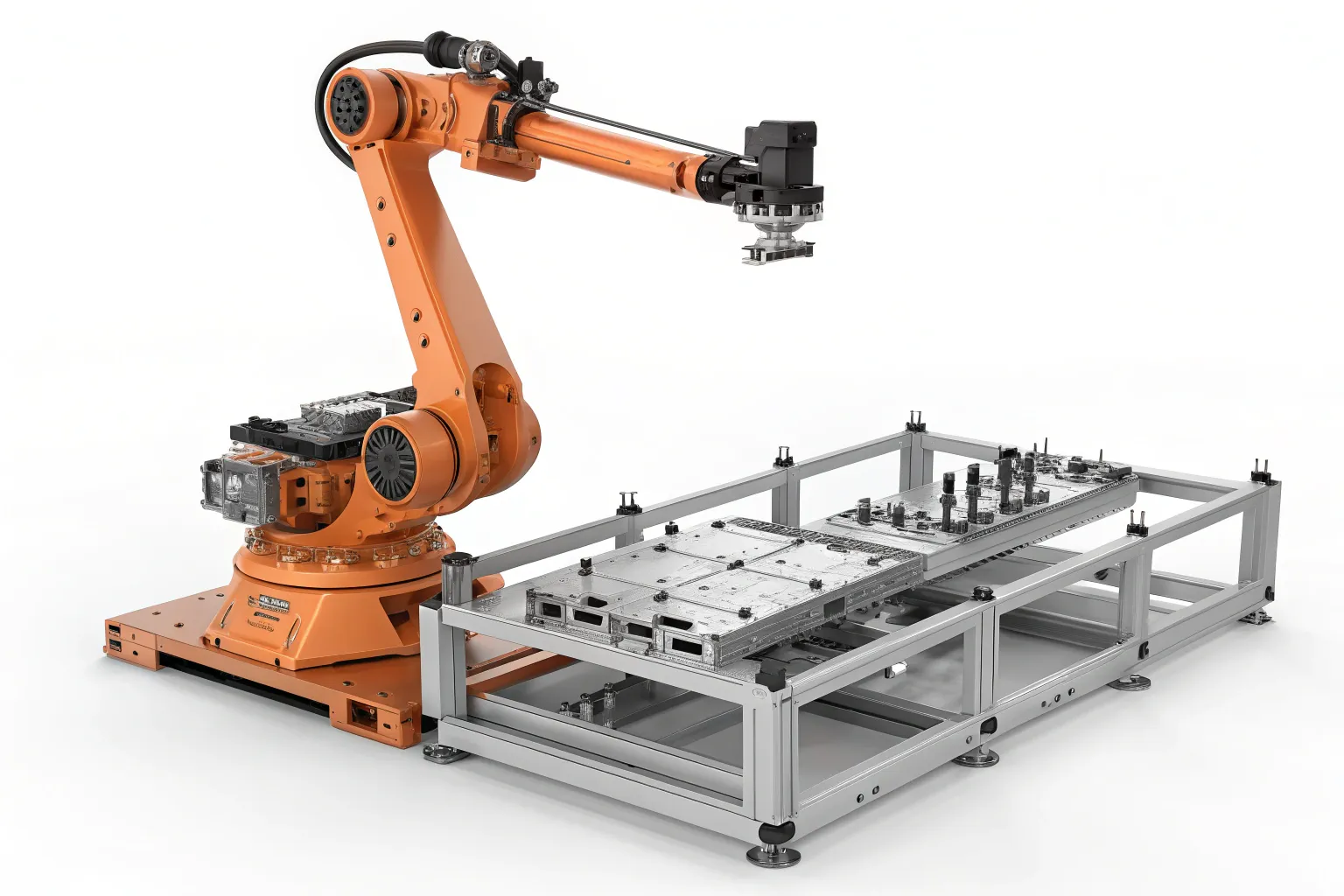
Robot Hardware for Industrial & Automation Systems
High-precision machining of robot structural hardware engineered for accuracy, rigidity, durability, and scalable production.


What Is Robot Hardware Machining
Robot hardware machining focuses on producing precision mechanical components that form the physical structure of robotic and automated systems. These parts directly affect positioning accuracy, structural rigidity, vibration behavior, and long-term operational stability.
We specialize in mechanical hardware manufacturing (not robot control software or electronics), delivering manufacturing-ready parts and supporting integration into industrial robotic systems.
Typical Robot Hardware Components
Precision mechanical parts for robot structures and automation platforms—engineered for interface accuracy and stable long-term performance.
- Robot arms and arm segments
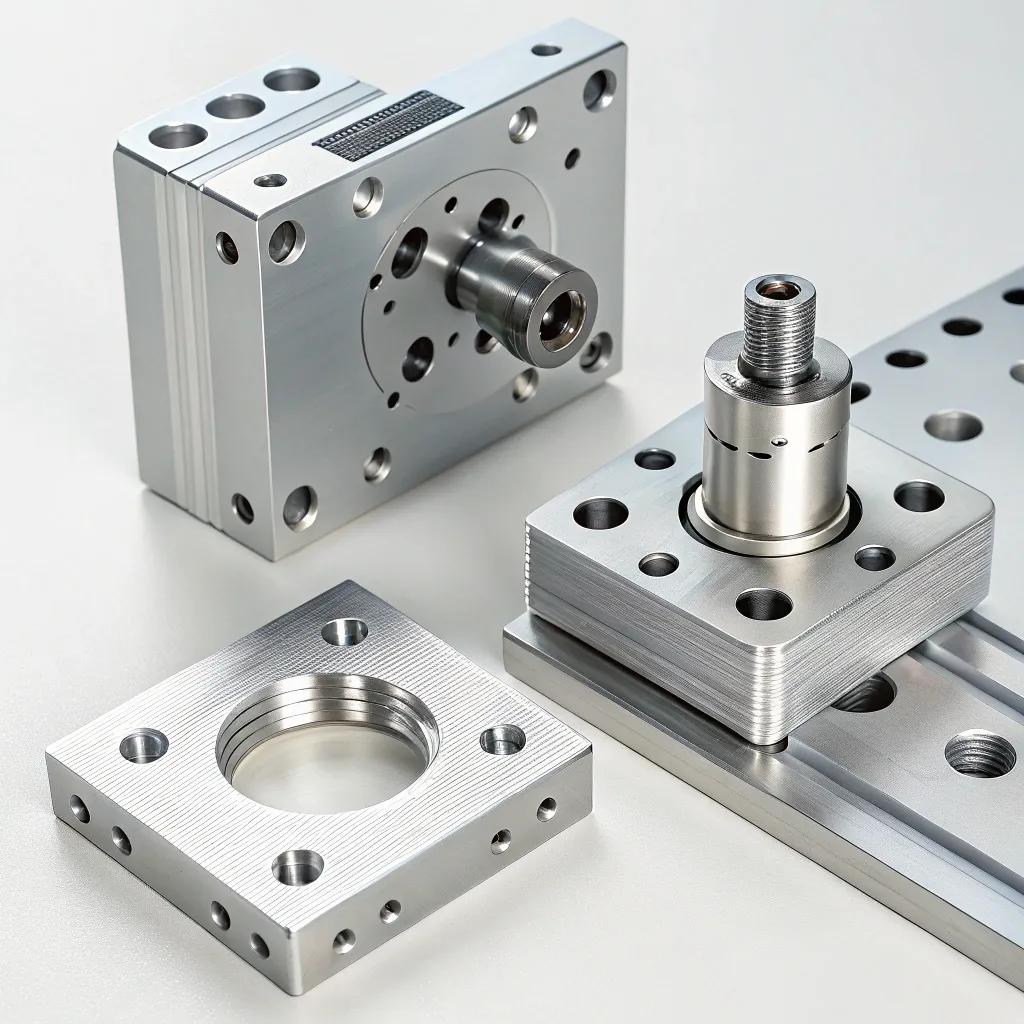
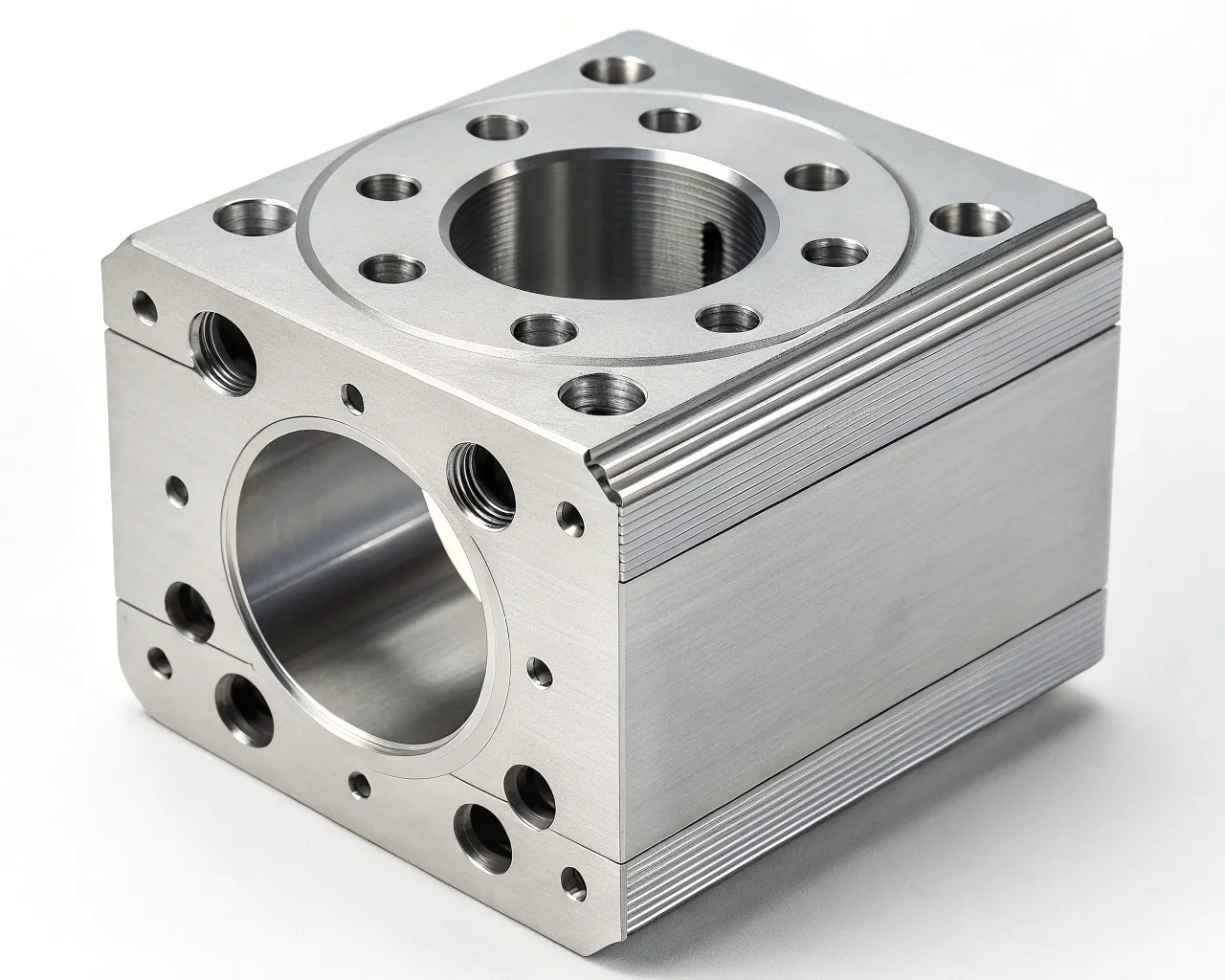
- Joint housings and joint covers
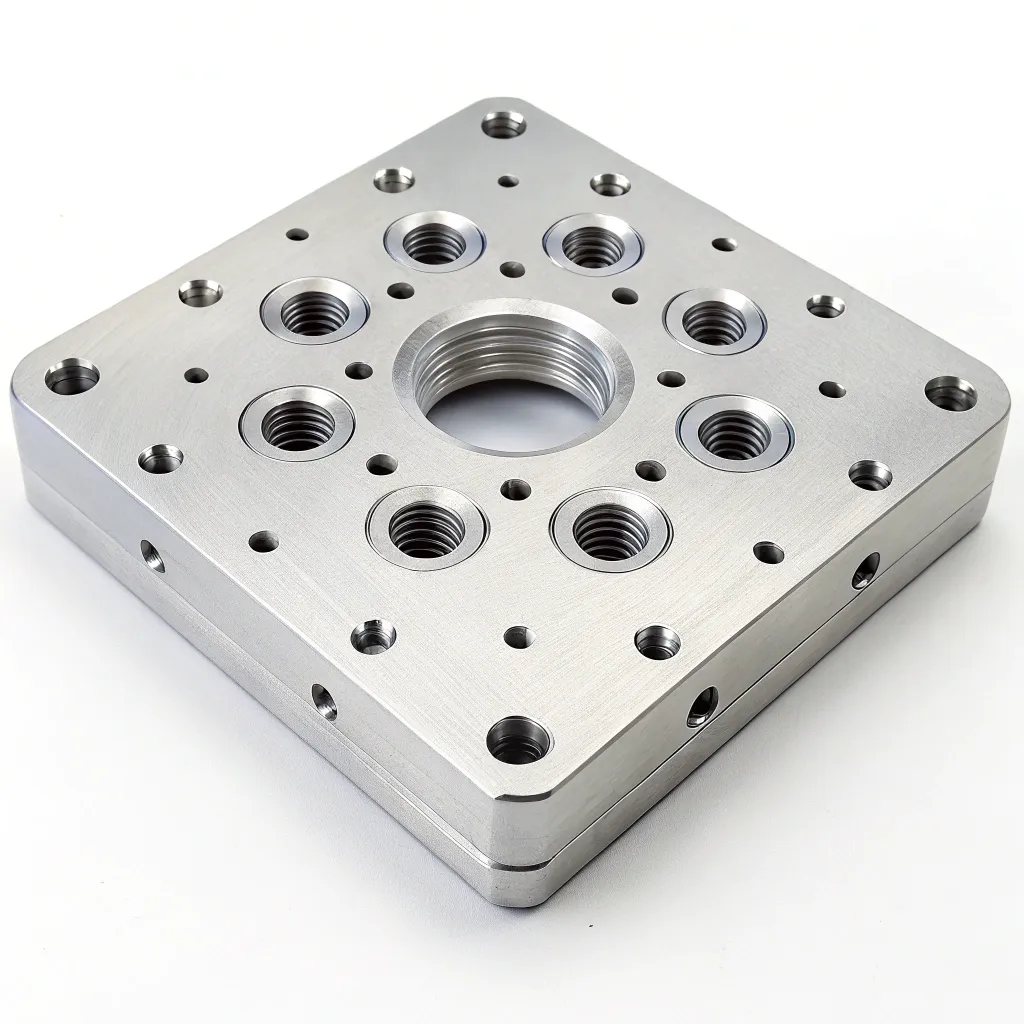
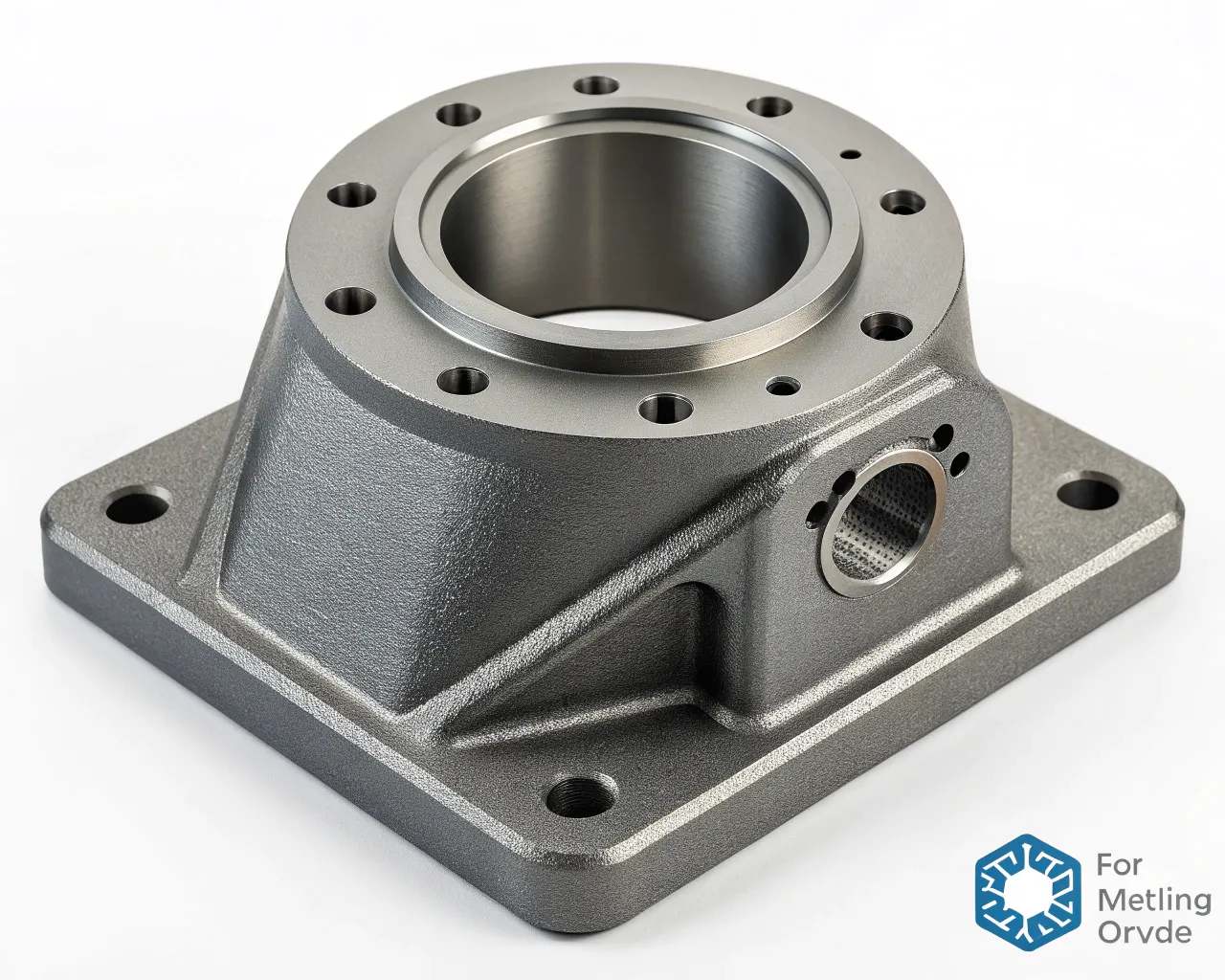
- Base frames and mounting plates
- Structural brackets and connectors
- End-effector mounting interfaces



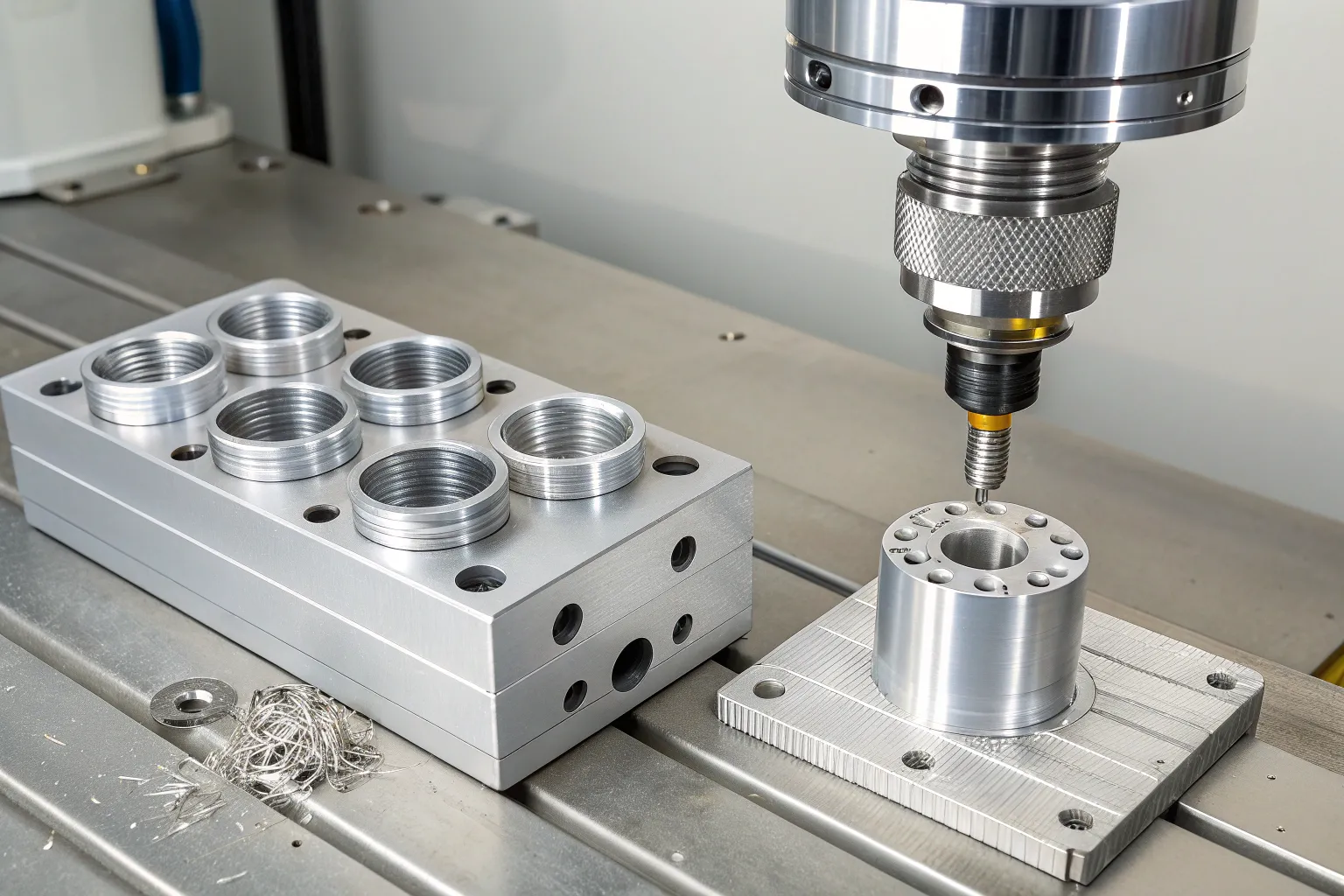
CNC Machining Capabilities for Robotics
Our CNC machining capability supports complex robot structures with tight interface control and stable batch repeatability.
- 3-axis, 4-axis and 5-axis CNC machining
- Large and medium-sized structural components
- Complex geometries and internal features
- Tight tolerance machining for critical interfaces

Precision and Tolerance Control
Robotic systems demand consistent accuracy. We machine critical interfaces with repeatability in mind.
- Datum scheme & GD&T notes (if available)
- Critical interfaces (bearing seats, alignment faces)
- Surface treatment requirements and masking zones

Structural Rigidity and Load Considerations
Robot hardware must withstand continuous motion and load cycles. We support stiffness and deformation control under dynamic loads.
Vibration and Motion Stability
Vibration directly impacts robot precision and lifespan. Our machining approach considers structural balance, interface accuracy, and resonance risk reduction.
- Reinforced rib designs and stiffness features
- Accurate mating surfaces and interface control
- Process consistency to avoid assembly-induced vibration

Material Expertise for Robot Hardware
Material selection balances weight, strength, and durability for industrial robotic platforms.
- Aluminum alloys (6061, 6082, 7075)
- Stainless steel (304, 316L)
- Structural steels and treated alloys
Surface Treatment Compatibility
Robot hardware often requires protective or functional surface treatments. Our machining designs consider treatment compatibility and masking needs.
- Anodizing
- Powder coating
- Hard coating for wear resistance
- Corrosion protection finishes
Assembly-Oriented Design Support
We design and machine robot hardware with assembly in mind—reducing complexity and improving consistency.
Quality Control and Inspection
Quality control is embedded throughout production to ensure stable performance in robotic systems.
- Dimensional inspection
- Critical interface verification
- Process documentation
- Traceability for production batches

Prototype to Mass Production Capability
We support the full manufacturing lifecycle for robot development and deployment.
Typical Application Scenarios
Robot hardware machining is applied across industrial automation and intelligent logistics systems.
Integration with Automation Systems
Our robot hardware components are designed to integrate cleanly with motors, gearboxes, sensors, and end-effectors—reducing assembly errors and improving serviceability.
- Motors and gearboxes
- Sensors and encoders
- Control and cabling systems
- End-effectors and tooling

Why Choose Us for Robot Hardware Machining
Built around what engineering teams care about: interface accuracy, rigidity, stable processes, and reliable scale-up.
Contact & Engineering Consultation
Discuss your robot hardware machining requirements with our team. Upload your drawings (STEP / DWG / PDF) for engineering review.